Simulation passes.
Prove-out still finds the crash.
Sim model diverges from the cell at the holder.
Collision checking runs during toolpath calculation — not after. The simulation is the execution model, not a separate approximation of it.
 Checked during calculation
✓Risk caught before post
Verified path segment
SIM ≡ EXEC · Δ 0.00 mm
Checked during calculation
✓Risk caught before post
Verified path segment
SIM ≡ EXEC · Δ 0.00 mm
Simulation passes.
Prove-out still finds the crash.
The toolpath looks fine.
The robot's joint motion does not.
The part geometry is not the issue.
The robot's route to get there is.
Moves collision checking into toolpath calculation — before prove-out becomes the test.
Send your STEP →Patterns paraphrased from public CAM and robot programming discussions.
Representative ranges. Actual exposure varies by material, cell rate, labor model, contract terms, and recovery time.
The same model calculates, verifies, simulates, and drives the robot path — before the post becomes the test.
Tool, holder, fixture, and machine collisions surface while CAM calculates — every committed move is already checked against the cell.
Stock state follows true B-rep solids, so simulation matches the machined part — not a sampled grid approximation.
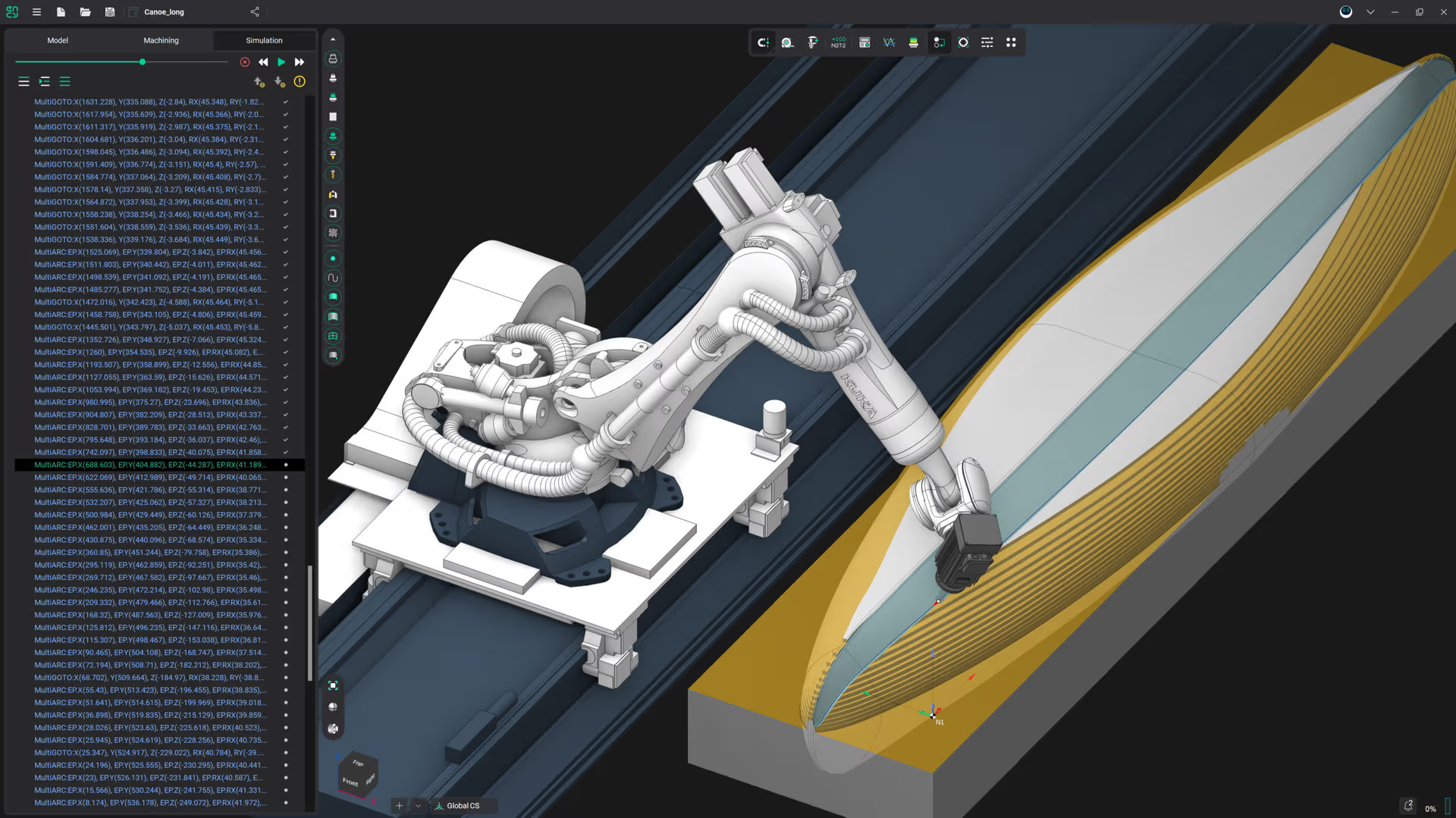
Drop in a robot model; ENCY maps its axes and generates singularity-aware, collision-checked trajectories without days of manual axis setup.
Link moves are planned in the robot's joint space — the path the robot actually takes, not the shortcut geometry suggests.